
今日のロボット
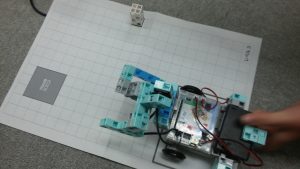
今回は自動ブロック運びロボットをご紹介します
コースがレベル1~5まで決まっていて、
どういう風に動けばしっかりとクリアできるかを考るのが大切ですね。
自動ロボの仕組みを考える
あと20年後にもなれば、自動運転技術が進化して、事故もなく目的地につける未来が来るといわれています。
では、その為に必要な事は何かを考えましょう
①ぶつからない事
人や物、走っている車にぶつかると事故になり、とても危険です
そうならない為にはいろいろな「センサー」を使って
今走っている道路がどういう状況かをしっかり判断するのが大事ですね。
この赤外線やレーザーと画像判別ソフトなどをたくさんの情報を合わせて、
物があるのか、走れるのか、人はいないかなどを判断します。
②正確に動くか
センサーの判断と同じか、それ以上に重要なのは「どう動く」かです
もっというとセンサーの情報をもとに「しっかりと動けるか」
例えば危なくなって急ブレーキをかけるとします。
センサーから急ブレーキをかけるという指示が出て実際に急ブレーキがかかる所になって、
もしいつも通りのブレーキしかかからなかったとすると、前にある物や人にぶつかるかもしれません。
「直角に曲がれ」という指示に対して、直角よりも浅かったり、深かったりしても危険です。
指示が出たときにその通りに動くように調整する
この話だけで「正確に動く」事が大切なのはわかっていただけたでしょうか。
最初の話に戻りますが、
ここでは正確に動く事が大事なので、「右に曲がる」や「左に曲がる」が浅かったり深かったりしないように
関数に分けて細かく調整してゴールを目指します。

ここで妥協せずに、自分の納得のいく理想の動きを作りだせるのが
ロボットプログラミングの面白いところでもありますね。
プログラミングの修正と調整を重ねて理想の動きを作り出す
角度の問題は多少ありますが、
しっかりとブロックをつかんで、はしっこですが、ちゃんと枠内に収まっているので合格です
調整を繰り返せば枠内の真ん中に運べるようになりますね。