
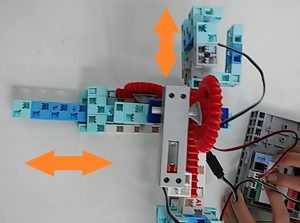
ギア移動式アームロボ
今日紹介するのは
移動して物をつかむアームロボです。
プログラムの流れ
どんな事に使われるのかはひとまず、
プログラムの流れを説明します
まず必要な動きが6つあります。
上・下・左・右
そしてアームを開いて・閉じるの6つです。
この動きを、今回は4つのボタンで動かします。
4つのボタンで6つの動き
アーテックの基盤には初めからボタンが4つ付いています
ここでは分かりやすいようにA~Dボタンとします。
上下左右はそれぞれ1つずつのボタンで動きます。Aボタンは上 Bボタンは下という風です。
アームの開閉は2つのボタンが押されたときに動く仕組みです。
1つのボタンで一つの動きは簡単ですが、
2つのボタンで動かすときはどうしたらいいでしょうか。
考え方としては、
例えば:1のボタンと2のボタンが押されていたら「ひらく」
2のボタンと3のボタンが押されていたら「とじる」
とすると、組み合わせで6つのボタンが出来上がりますね。
プログラムをきれいに作る
プログラムを作っていく上で大事なのが「分かりやすさ」です
動きや機能を増やすと複雑になっていくので、その時は分かっていても
1週間後に見たときにはどうなっているのか分からなくなっては、その時作った時間が無駄になります。
なので、誰が見ても分かり、1週間後でも、1年後でも見たらすぐに分かるように整理しながら作ってみてください。
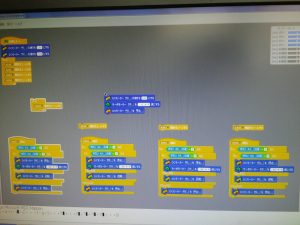
左から分かりやすいように関数が並べられています。
見やすく、分かりやすいですね。
実際の動き
上下左右のボタンを組み合わせているので、
プログラムの順番を間違えるとアームと位置が同時に動いてしまいますが、
アームと上下左右の動きがしっかり分けられています。
ボタンを増やすには?
今回説明した組み合わせより、ボタンを増やすにはどういう組み合わせが出来るか、考えてみてください。
全部で何種類できるか数えてみるのも面白いですよ!
どんな事に使えるかな?
シンプルな構造で、一見すると何に使えるか分からないかもしれませんね。
どんな事に使われているのか考えてみてください。
答えは「今日はロボ-鬼退治ロボ」で!