
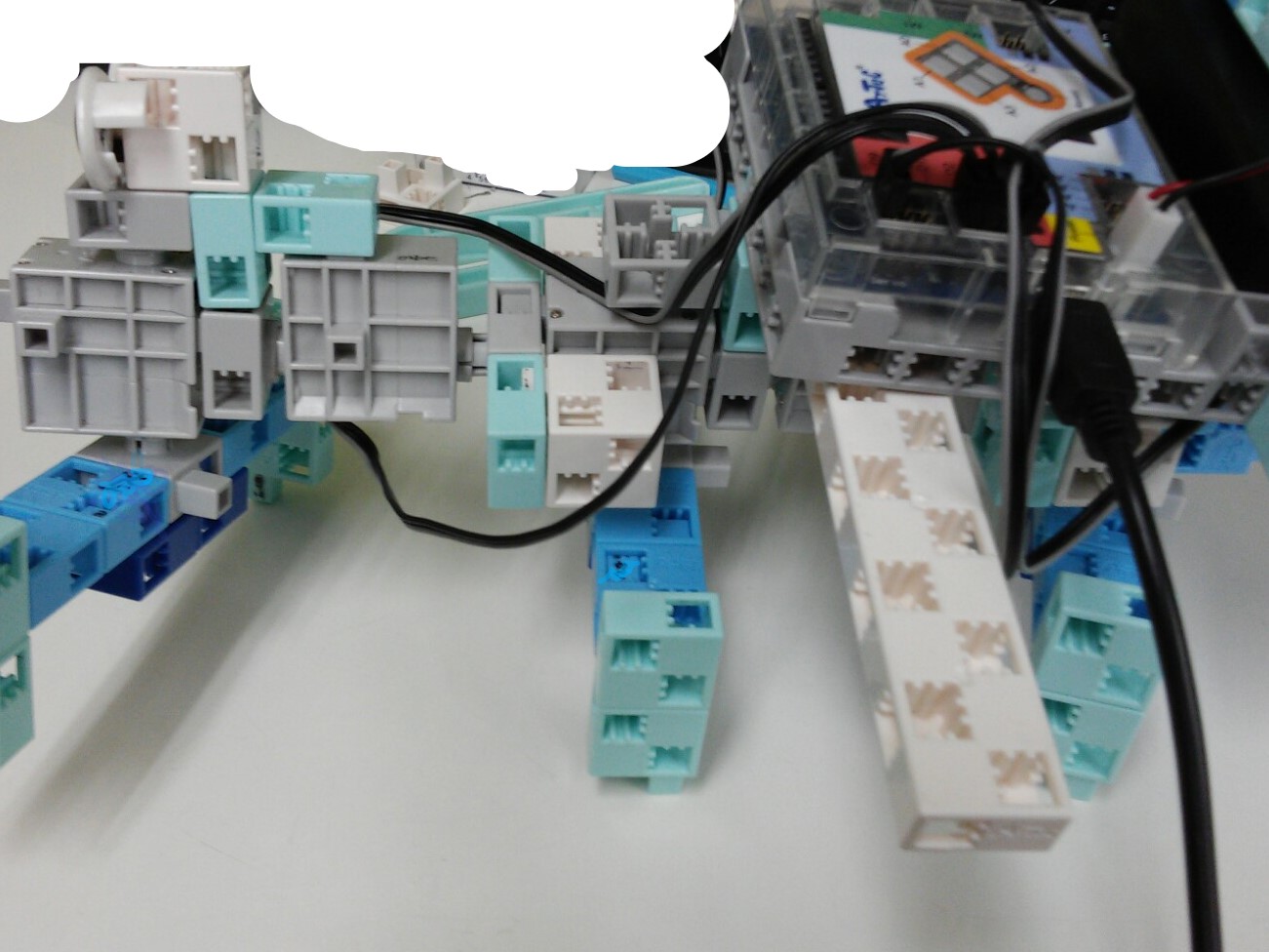
6足歩行ロボ!
今日紹介するのは6足歩行ロボ!
サーボモーターを5つ使って動かしています
プログラムの流れ
プログラムの流れを説明します
今回は関数を使いました。
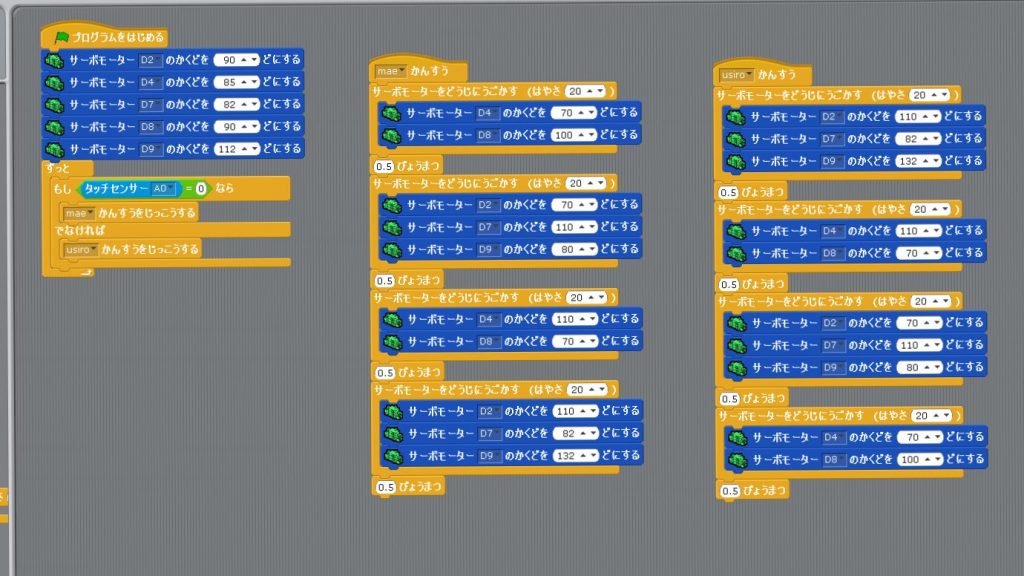
前足・中足・後足と
関節の軸足を交互に組み合わせる事が重要です
まえとうしろ
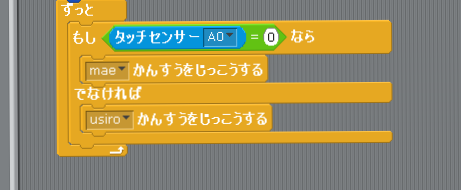
タッチセンサー
実際の動き
どんな事に使えるかな?
今回は複数の関節(サーボモーター)を使って生き物を再現したロボットになりましたが
この多関節(たかんせつ)を使ったロボットは実際の工場でも使われています
例として、ヤマハの産業用ロボットを見てみてください
https://www.yamaha-motor.co.jp/robot/lineup/ya/
今回のロボットにセンサーなどを組み合わせて、お客さんの欲しいロボットが作れると
ロボットプログラミングがより面白くなっていくと思います。