今日のロボット
生徒さんが作成したロボットのクオリティが中々の完成でしたので紹介します!
プログラミングも自分で細かく調整した結果が、ロボットの動きにもちゃんと表れていますね!
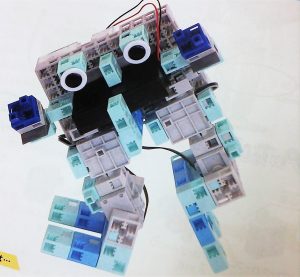
二足歩行ロボット
ロボットと言えばこれ!
ザ・二足歩行ロボットです。

歩くという動作を考える
歩くためには関節がひつよう
私たちは普段何気なく歩いていますが、
実は多くの関節(かんせつ)を使って動いています。
この「歩くという動作はどうやって出来ているかを考える」ところからこのプログラミングは始まります。
全部言うと足の指から必要になりますが、
今回は足首(あしくび)・足の付け根(股関節)の2つを、モーターで再現して
歩くロボットを作ります。
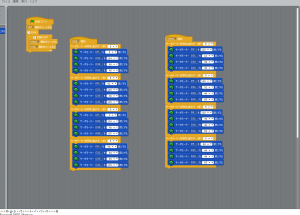
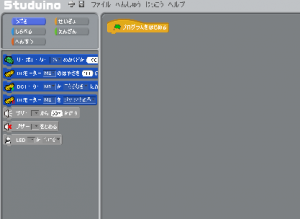
動きの順番を考える
それをプログラミングで再現すると、
その通りにロボットが動いてくれます。
①右足を上げる
↓
②右足が前に出る
↓
③左足も調整しながら、転ばないように右足が着地する。
のような順番になりますね。
この後は左足の制御になります。
プログラミングの修正と調整を重ねて理想の動きを作り出す
歩かせるために、転ばないように、倒れないようにしないといけません。
何も無い状態から、
1つずつではなく、
複数のサーボモーターを同時に制御しながら
転ばないように調整していきます。